Changes: - Disclaimer in README - Replaced all occurences of Gym with Gymnasium - Removed code that is now dead since we no longer need to support the old step API - Updated type hints to only allow new step API - Increased required version of envpool to support Gymnasium - Increased required version of PettingZoo to support Gymnasium - Updated `PettingZooEnv` to only use the new step API, removed hack to also support old API - I had to add some `# type: ignore` comments, due to new type hinting in Gymnasium. I'm not that familiar with type hinting but I believe that the issue is on the Gymnasium side and we are looking into it. - Had to update `MyTestEnv` to support `options` kwarg - Skip NNI tests because they still use OpenAI Gym - Also allow `PettingZooEnv` in vector environment - Updated doc page about ReplayBuffer to also talk about terminated and truncated flags. Still need to do: - Update the Jupyter notebooks in docs - Check the entire code base for more dead code (from compatibility stuff) - Check the reset functions of all environments/wrappers in code base to make sure they use the `options` kwarg - Someone might want to check test_env_finite.py - Is it okay to allow `PettingZooEnv` in vector environments? Might need to update docs?
Atari Environment
EnvPool
We highly recommend using envpool to run the following experiments. To install, in a linux machine, type:
pip install envpool
After that, atari_wrapper will automatically switch to envpool's Atari env. EnvPool's implementation is much faster (about 2~3x faster for pure execution speed, 1.5x for overall RL training pipeline) than python vectorized env implementation, and it's behavior is consistent to that approach (OpenAI wrapper), which will describe below.
For more information, please refer to EnvPool's GitHub, Docs, and 3rd-party report.
ALE-py
The sample speed is ~3000 env step per second (~12000 Atari frame per second in fact since we use frame_stack=4) under the normal mode (use a CNN policy and a collector, also storing data into the buffer).
The env wrapper is a crucial thing. Without wrappers, the agent cannot perform well enough on Atari games. Many existing RL codebases use OpenAI wrapper, but it is not the original DeepMind version (related issue). Dopamine has a different wrapper but unfortunately it cannot work very well in our codebase.
DQN (single run)
One epoch here is equal to 100,000 env step, 100 epochs stand for 10M.
| task | best reward | reward curve | parameters | time cost |
|---|---|---|---|---|
| PongNoFrameskip-v4 | 20 |  |
python3 atari_dqn.py --task "PongNoFrameskip-v4" --batch-size 64 |
~30 min (~15 epoch) |
| BreakoutNoFrameskip-v4 | 316 |  |
python3 atari_dqn.py --task "BreakoutNoFrameskip-v4" --test-num 100 |
3~4h (100 epoch) |
| EnduroNoFrameskip-v4 | 670 |  |
python3 atari_dqn.py --task "EnduroNoFrameskip-v4 " --test-num 100 |
3~4h (100 epoch) |
| QbertNoFrameskip-v4 | 7307 |  |
python3 atari_dqn.py --task "QbertNoFrameskip-v4" --test-num 100 |
3~4h (100 epoch) |
| MsPacmanNoFrameskip-v4 | 2107 |  |
python3 atari_dqn.py --task "MsPacmanNoFrameskip-v4" --test-num 100 |
3~4h (100 epoch) |
| SeaquestNoFrameskip-v4 | 2088 | 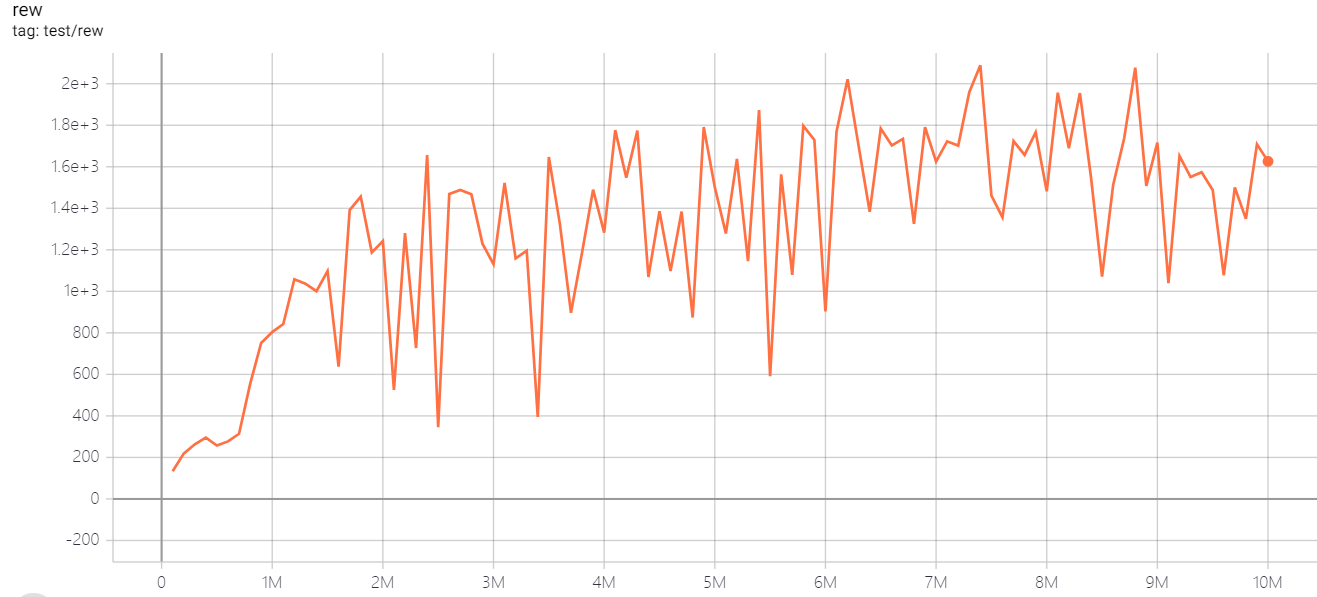 |
python3 atari_dqn.py --task "SeaquestNoFrameskip-v4" --test-num 100 |
3~4h (100 epoch) |
| SpaceInvadersNoFrameskip-v4 | 812.2 |  |
python3 atari_dqn.py --task "SpaceInvadersNoFrameskip-v4" --test-num 100 |
3~4h (100 epoch) |
Note: The eps_train_final and eps_test in the original DQN paper is 0.1 and 0.01, but some works found that smaller eps helps improve the performance. Also, a large batchsize (say 64 instead of 32) will help faster convergence but will slow down the training speed.
We haven't tuned this result to the best, so have fun with playing these hyperparameters!
C51 (single run)
One epoch here is equal to 100,000 env step, 100 epochs stand for 10M.
| task | best reward | reward curve | parameters |
|---|---|---|---|
| PongNoFrameskip-v4 | 20 |  |
python3 atari_c51.py --task "PongNoFrameskip-v4" --batch-size 64 |
| BreakoutNoFrameskip-v4 | 536.6 |  |
python3 atari_c51.py --task "BreakoutNoFrameskip-v4" --n-step 1 |
| EnduroNoFrameskip-v4 | 1032 |  |
python3 atari_c51.py --task "EnduroNoFrameskip-v4 " |
| QbertNoFrameskip-v4 | 16245 |  |
python3 atari_c51.py --task "QbertNoFrameskip-v4" |
| MsPacmanNoFrameskip-v4 | 3133 |  |
python3 atari_c51.py --task "MsPacmanNoFrameskip-v4" |
| SeaquestNoFrameskip-v4 | 6226 |  |
python3 atari_c51.py --task "SeaquestNoFrameskip-v4" |
| SpaceInvadersNoFrameskip-v4 | 988.5 |  |
python3 atari_c51.py --task "SpaceInvadersNoFrameskip-v4" |
Note: The selection of n_step is based on Figure 6 in the Rainbow paper.
QRDQN (single run)
One epoch here is equal to 100,000 env step, 100 epochs stand for 10M.
| task | best reward | reward curve | parameters |
|---|---|---|---|
| PongNoFrameskip-v4 | 20 |  |
python3 atari_qrdqn.py --task "PongNoFrameskip-v4" --batch-size 64 |
| BreakoutNoFrameskip-v4 | 409.2 |  |
python3 atari_qrdqn.py --task "BreakoutNoFrameskip-v4" --n-step 1 |
| EnduroNoFrameskip-v4 | 1055.9 |  |
python3 atari_qrdqn.py --task "EnduroNoFrameskip-v4" |
| QbertNoFrameskip-v4 | 14990 |  |
python3 atari_qrdqn.py --task "QbertNoFrameskip-v4" |
| MsPacmanNoFrameskip-v4 | 2886 |  |
python3 atari_qrdqn.py --task "MsPacmanNoFrameskip-v4" |
| SeaquestNoFrameskip-v4 | 5676 |  |
python3 atari_qrdqn.py --task "SeaquestNoFrameskip-v4" |
| SpaceInvadersNoFrameskip-v4 | 938 |  |
python3 atari_qrdqn.py --task "SpaceInvadersNoFrameskip-v4" |
IQN (single run)
One epoch here is equal to 100,000 env step, 100 epochs stand for 10M.
| task | best reward | reward curve | parameters |
|---|---|---|---|
| PongNoFrameskip-v4 | 20.3 |  |
python3 atari_iqn.py --task "PongNoFrameskip-v4" --batch-size 64 |
| BreakoutNoFrameskip-v4 | 496.7 |  |
python3 atari_iqn.py --task "BreakoutNoFrameskip-v4" --n-step 1 |
| EnduroNoFrameskip-v4 | 1545 |  |
python3 atari_iqn.py --task "EnduroNoFrameskip-v4" |
| QbertNoFrameskip-v4 | 15342.5 |  |
python3 atari_iqn.py --task "QbertNoFrameskip-v4" |
| MsPacmanNoFrameskip-v4 | 2915 |  |
python3 atari_iqn.py --task "MsPacmanNoFrameskip-v4" |
| SeaquestNoFrameskip-v4 | 4874 |  |
python3 atari_iqn.py --task "SeaquestNoFrameskip-v4" |
| SpaceInvadersNoFrameskip-v4 | 1498.5 |  |
python3 atari_iqn.py --task "SpaceInvadersNoFrameskip-v4" |
FQF (single run)
One epoch here is equal to 100,000 env step, 100 epochs stand for 10M.
| task | best reward | reward curve | parameters |
|---|---|---|---|
| PongNoFrameskip-v4 | 20.7 | 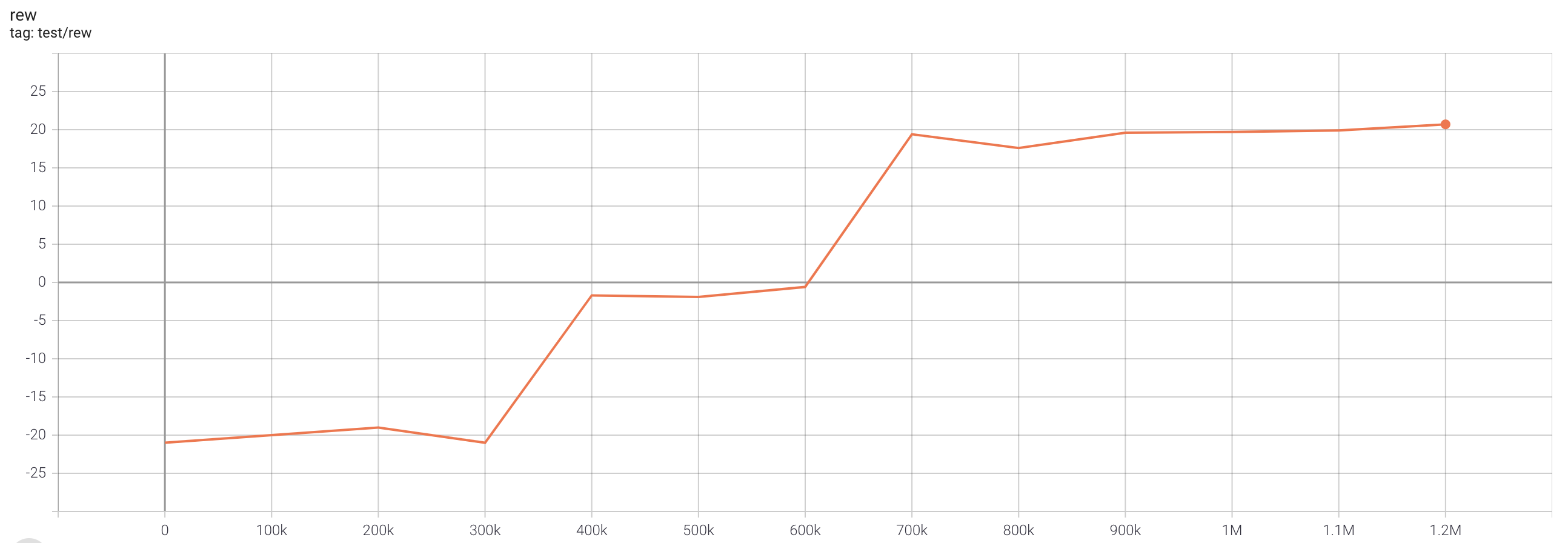 |
python3 atari_fqf.py --task "PongNoFrameskip-v4" --batch-size 64 |
| BreakoutNoFrameskip-v4 | 517.3 |  |
python3 atari_fqf.py --task "BreakoutNoFrameskip-v4" --n-step 1 |
| EnduroNoFrameskip-v4 | 2240.5 |  |
python3 atari_fqf.py --task "EnduroNoFrameskip-v4" |
| QbertNoFrameskip-v4 | 16172.5 |  |
python3 atari_fqf.py --task "QbertNoFrameskip-v4" |
| MsPacmanNoFrameskip-v4 | 2429 |  |
python3 atari_fqf.py --task "MsPacmanNoFrameskip-v4" |
| SeaquestNoFrameskip-v4 | 10775 |  |
python3 atari_fqf.py --task "SeaquestNoFrameskip-v4" |
| SpaceInvadersNoFrameskip-v4 | 2482 |  |
python3 atari_fqf.py --task "SpaceInvadersNoFrameskip-v4" |
Rainbow (single run)
One epoch here is equal to 100,000 env step, 100 epochs stand for 10M.
| task | best reward | reward curve | parameters |
|---|---|---|---|
| PongNoFrameskip-v4 | 21 |  |
python3 atari_rainbow.py --task "PongNoFrameskip-v4" --batch-size 64 |
| BreakoutNoFrameskip-v4 | 684.6 |  |
python3 atari_rainbow.py --task "BreakoutNoFrameskip-v4" --n-step 1 |
| EnduroNoFrameskip-v4 | 1625.9 |  |
python3 atari_rainbow.py --task "EnduroNoFrameskip-v4" |
| QbertNoFrameskip-v4 | 16192.5 |  |
python3 atari_rainbow.py --task "QbertNoFrameskip-v4" |
| MsPacmanNoFrameskip-v4 | 3101 |  |
python3 atari_rainbow.py --task "MsPacmanNoFrameskip-v4" |
| SeaquestNoFrameskip-v4 | 2126 |  |
python3 atari_rainbow.py --task "SeaquestNoFrameskip-v4" |
| SpaceInvadersNoFrameskip-v4 | 1794.5 |  |
python3 atari_rainbow.py --task "SpaceInvadersNoFrameskip-v4" |
PPO (single run)
One epoch here is equal to 100,000 env step, 100 epochs stand for 10M.
| task | best reward | reward curve | parameters |
|---|---|---|---|
| PongNoFrameskip-v4 | 20.2 |  |
python3 atari_ppo.py --task "PongNoFrameskip-v4" |
| BreakoutNoFrameskip-v4 | 441.8 | 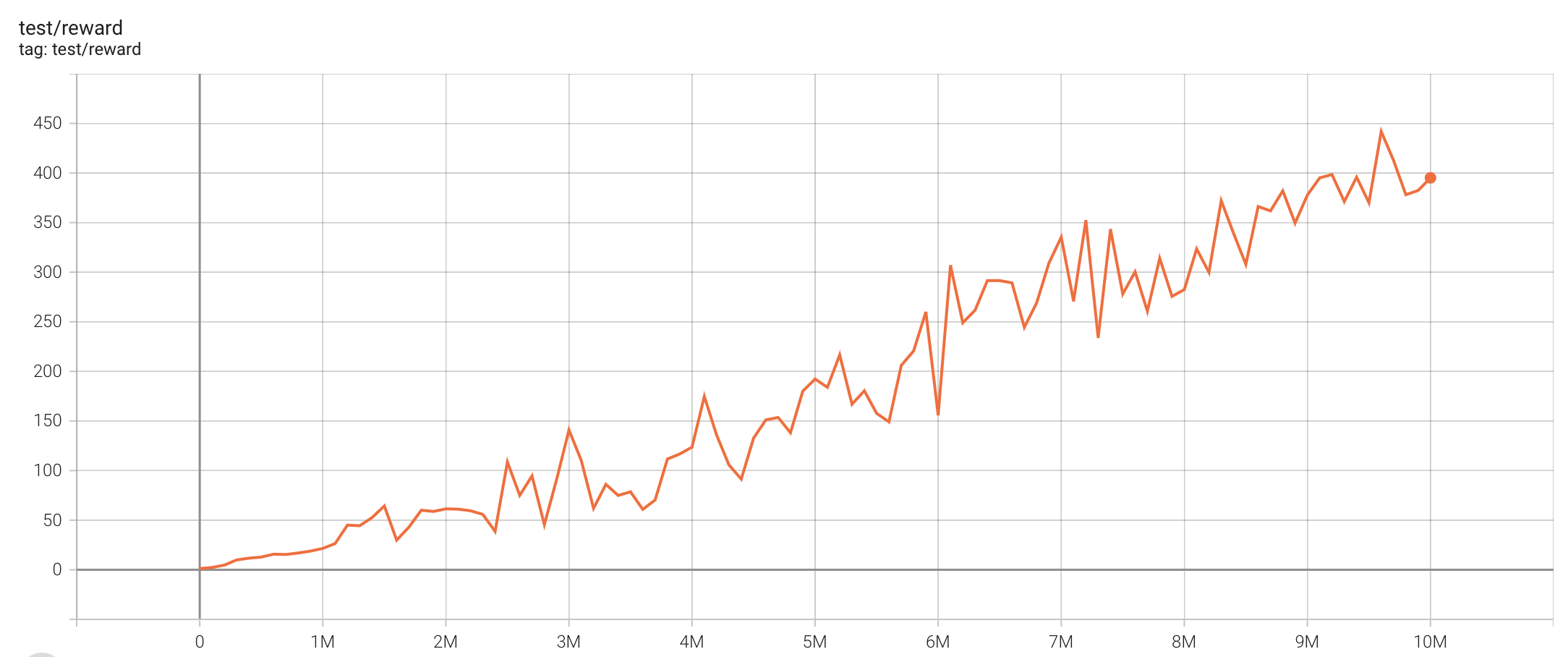 |
python3 atari_ppo.py --task "BreakoutNoFrameskip-v4" |
| EnduroNoFrameskip-v4 | 1245.4 |  |
python3 atari_ppo.py --task "EnduroNoFrameskip-v4" |
| QbertNoFrameskip-v4 | 17395 |  |
python3 atari_ppo.py --task "QbertNoFrameskip-v4" |
| MsPacmanNoFrameskip-v4 | 2098 |  |
python3 atari_ppo.py --task "MsPacmanNoFrameskip-v4" |
| SeaquestNoFrameskip-v4 | 882 |  |
python3 atari_ppo.py --task "SeaquestNoFrameskip-v4" --lr 1e-4 |
| SpaceInvadersNoFrameskip-v4 | 1340.5 |  |
python3 atari_ppo.py --task "SpaceInvadersNoFrameskip-v4" |
SAC (single run)
One epoch here is equal to 100,000 env step, 100 epochs stand for 10M.
| task | best reward | reward curve | parameters |
|---|---|---|---|
| PongNoFrameskip-v4 | 20.1 |  |
python3 atari_sac.py --task "PongNoFrameskip-v4" |
| BreakoutNoFrameskip-v4 | 211.2 |  |
python3 atari_sac.py --task "BreakoutNoFrameskip-v4" --n-step 1 --actor-lr 1e-4 --critic-lr 1e-4 |
| EnduroNoFrameskip-v4 | 1290.7 |  |
python3 atari_sac.py --task "EnduroNoFrameskip-v4" |
| QbertNoFrameskip-v4 | 13157.5 |  |
python3 atari_sac.py --task "QbertNoFrameskip-v4" |
| MsPacmanNoFrameskip-v4 | 3836 |  |
python3 atari_sac.py --task "MsPacmanNoFrameskip-v4" |
| SeaquestNoFrameskip-v4 | 1772 |  |
python3 atari_sac.py --task "SeaquestNoFrameskip-v4" |
| SpaceInvadersNoFrameskip-v4 | 649 | 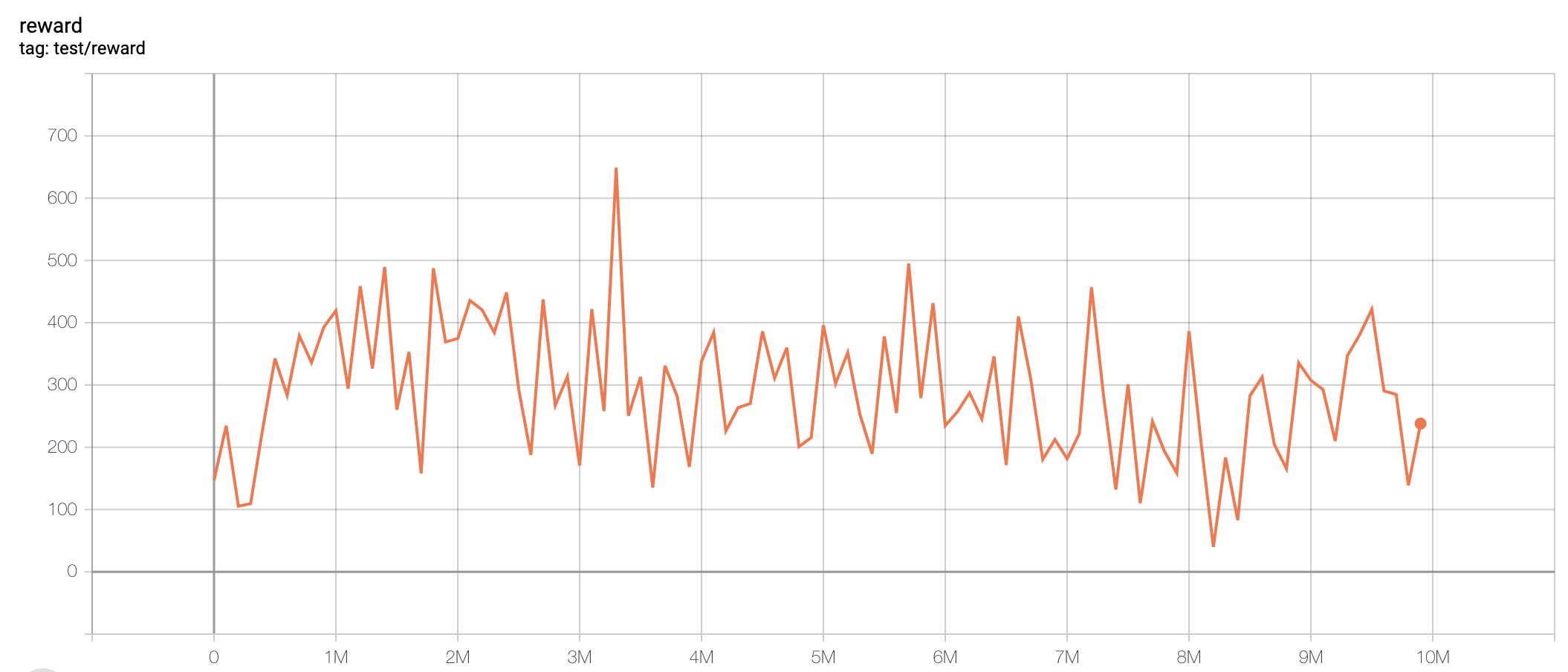 |
python3 atari_sac.py --task "SpaceInvadersNoFrameskip-v4" |