{kind=link}
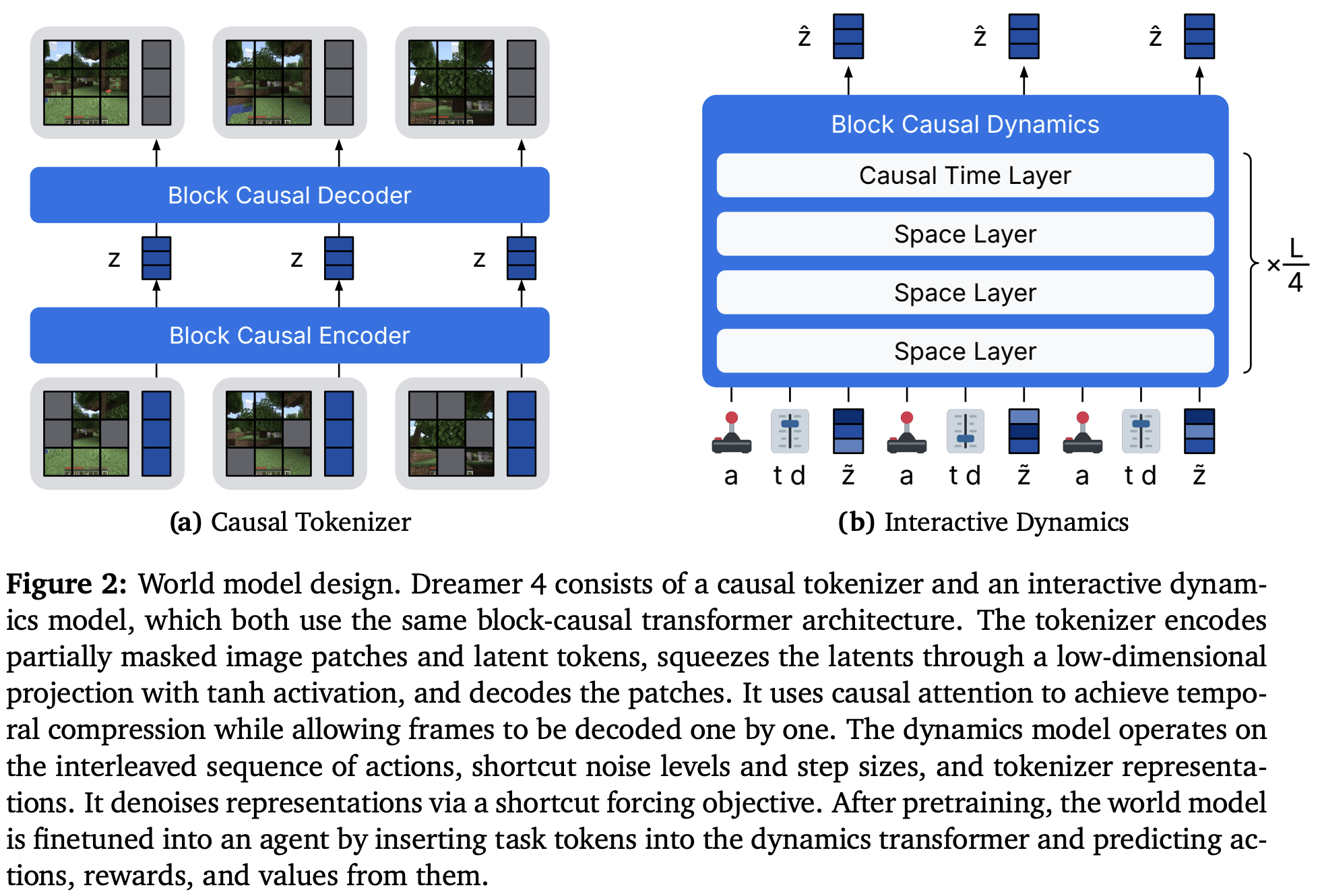
Dreamer 4
Implementation of Danijar's latest iteration for his Dreamer line of work
Discord channel for collaborating with other researchers interested in this work
Appreciation
- @dirkmcpherson for fixes to typo errors and unpassed arguments!
Install
$ pip install dreamer4
Usage
import torch
from dreamer4 import VideoTokenizer, DynamicsWorldModel
# video tokenizer, learned through MAE + lpips
tokenizer = VideoTokenizer(
dim = 512,
dim_latent = 32,
patch_size = 32,
image_height = 256,
image_width = 256
)
video = torch.randn(2, 3, 10, 256, 256)
# learn the tokenizer
loss = tokenizer(video)
loss.backward()
# dynamics world model
world_model = DynamicsWorldModel(
dim = 512,
dim_latent = 32,
video_tokenizer = tokenizer,
num_discrete_actions = 4,
num_residual_streams = 1
)
# state, action, rewards
video = torch.randn(2, 3, 10, 256, 256)
discrete_actions = torch.randint(0, 4, (2, 10, 1))
rewards = torch.randn(2, 10)
# learn dynamics / behavior cloned model
loss = world_model(
video = video,
rewards = rewards,
discrete_actions = discrete_actions
)
loss.backward()
# do the above with much data
# then generate dreams
dreams = world_model.generate(
10,
batch_size = 2,
return_decoded_video = True,
return_for_policy_optimization = True
)
# learn from the dreams
actor_loss, critic_loss = world_model.learn_from_experience(dreams)
(actor_loss + critic_loss).backward()
# learn from environment
from dreamer4.mocks import MockEnv
mock_env = MockEnv((256, 256), vectorized = True, num_envs = 4)
experience = world_model.interact_with_env(mock_env, max_timesteps = 8, env_is_vectorized = True)
actor_loss, critic_loss = world_model.learn_from_experience(experience)
(actor_loss + critic_loss).backward()
Citation
@misc{hafner2025trainingagentsinsidescalable,
title = {Training Agents Inside of Scalable World Models},
author = {Danijar Hafner and Wilson Yan and Timothy Lillicrap},
year = {2025},
eprint = {2509.24527},
archivePrefix = {arXiv},
primaryClass = {cs.AI},
url = {https://arxiv.org/abs/2509.24527},
}
the conquest of nature is to be achieved through number and measure - angels to Descartes in a dream